PRAM Plataforma
Robótica de Aplicaciones Múltiple
La
mayoría de las aplicaciones robóticas implican el desplazamiento de un móvil en
el entorno físico y muchas de las características de éstos son comunes en casi
todos los casos. Se
plantea el desarrollo de una plataforma versátil y transformable dotada de una
serie de características modulares útiles para muchos de los futuros proyectos.
Dicha
plataforma es un conjunto de elementos y soluciones que el autor ha ido
desarrollando y adaptando a lo largo de ańos de trabajo y que comprende tres
grandes paquetes:
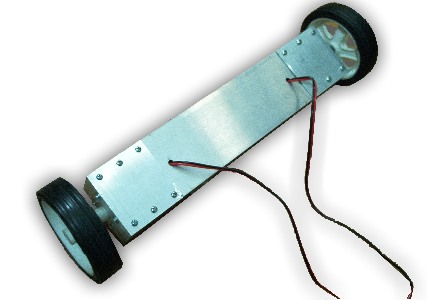
El
elemento mecánico principal es un eje autoportado de 40 cm de largo, de
construcción metálica, completamente montado mediante tornillos, preparado para
ser acoplado a diferentes plataformas de vehículos. Sus principales
características son:
-
Robusta
construcción en duraluminio extruído
-
Motoreductores
y neumáticos incorporados
-
Sistema
de dirección por tracción diferencial
(gira 180° sobre su propio eje)
-
Batería
recargable incorporada
|
 |
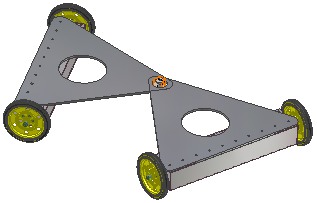
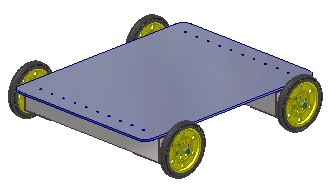
Este eje sirve
de base para un conjunto de plataformas modulares reconfigurables y adaptables
a diferentes necesidades de movilidad, fuerza y tracción.
Ejemplos:
Electrónica
Placa
moherboard para soporte de un microcontrolador de la gama media y
todos los perisféricos esenciales requeridos para su funcionamiento: fuente de
alimentación, reset, programación In Circuit, múltiples sistemas de
comunicaciones (USB, inalámbricos, etc.). Disponibilidad de todas las líneas de
entrada/salida de datos en buses de expansión provisto de conectores
rápidos, compatibles entre sí.
Módulos
de Expansión de la Placa motherboard
-
Control
de potencia (motores, actuadores, etc)
-
Entradas
analógicas y digitales (sensores, interruptores)
-
Display
LCD y teclado de 16 teclas
-
Módulo
indicador de LEDS
-
Comunicaciones
por cable (RS232, I2C, USB)
-
Comunicaciones
inalámbricas (RF, Bluetooth, Zigbee)
Software
En el proyecto podemos diferenciar dos aplicaciones de softuare completamente
diferentes, destinadas cada una a un propósito distinto.
Una correrá en una PC fija, en forma externa a la plataforma y al robot de la que ésta forme parte. El otro lo hará sobre el propio
microcontrolador de la Placa Madre, siendo el que constituye la verdadera inteligencia del robot
Software para Estación fija
La aplicación destinada a la PC fija está destinada a servir
de apoyo al desarrollo primero y a prestar asistencia a la navegación luego, cuando la plataforma esté completamente
montada en un robot. Con tal motivo, incorpora capacidades de Computer Vision, de modo de poder "ver" los movimientos
del robot y todo su entorno. Un sistema de transmisión inalámbrica permite transmitir a la Placa Madre montada en la
Plataforma datos de posición, velocidad, etc., así como las imágenes del entorno que se puedan tomar con las cámaras
que equipan la estación fija.
Debe quedar claro que esta Estación y su software no forman parte realmente del robot. Simplemente lo asisten brindándole
información sobre el entorno, tal como los sistemas de GPS y mapas satelitales lo hacen habitualmente en la náutica o los
modernos automóviles
Software para Plataforma Móvil
Es la verdadero inteligencia que controla desplazamientos y otros movimimiento básicos del robot
................................... En Construcción ......................................